ROS2 토픽 데이터 분석 및 엑셀 파일로 저장하기 (by RPLiDAR A1)
이번 글은 RPLiDAR A1을 사용하여 라이다의 데이터를 분석에 용이한 엑셀 파일로 변환하는 방법에 대해 이야기하고자 합니다.
-사양 확인-
- Jetson Nano 2GB Dev Kit
- Ubuntu 20.04 LTS
- ROS2 Foxy

ROS2 노드
RPLiDAR A1 노드를 실행해보도록 하겠습니다.
ros2 launch rplidar_ros2 view_rplidar_launch.py
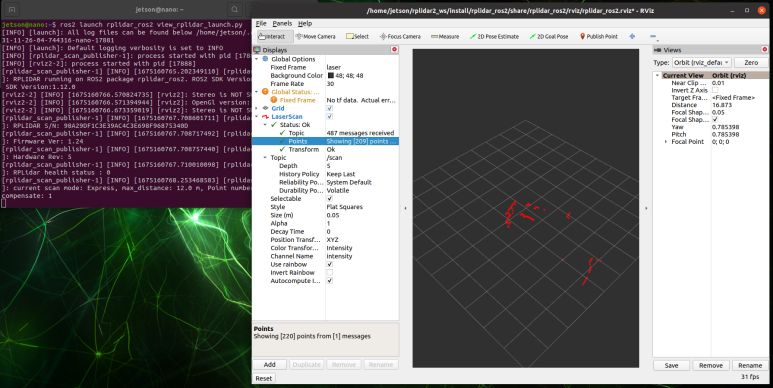
Rviz2에서 메세지는 관측되고 있는 포인트 갯수를 확인할 수 있습니다.
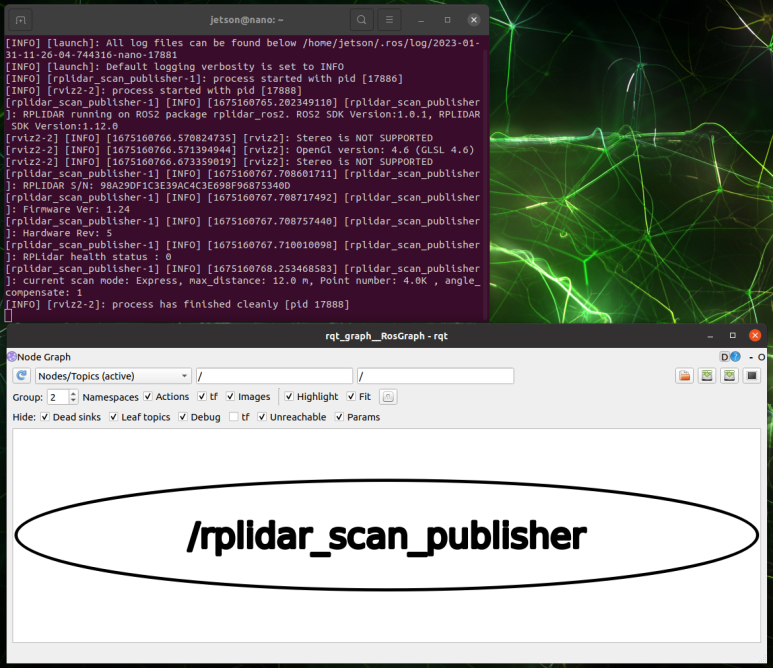
현재 실행 중인 노드 구성에 대하여 ‘rqt_graph’로 확인해 보았습니다. RPLiDAR A1 ‘Launch’파일을 통해 실행한 노드들을 보면, 2D 클라우드 포인트 데이터를 퍼블리시하는 /rplidar_scan_publisher가 있습니다.
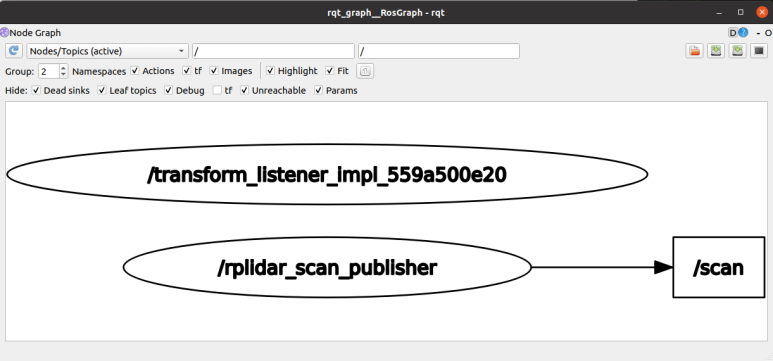
그리고 바로 위로 /transform_listener 가 있습니다. 그럼 RPLiDAR 퍼블리셔는 놔두고 Rviz2만 종료해보았습니다.
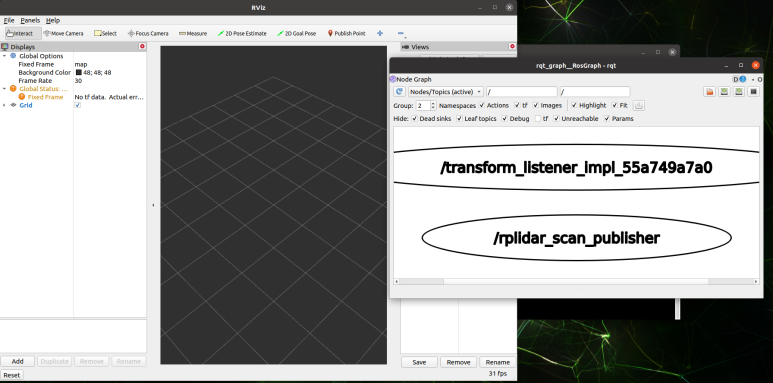
/transform_listener는 없고 RPLiDAR 퍼블리셔만 남아 있습니다.
Rviz2를 다시 실행해보니 아래와 같이 /transform_listener 노드가 다시 생성되었습니다.
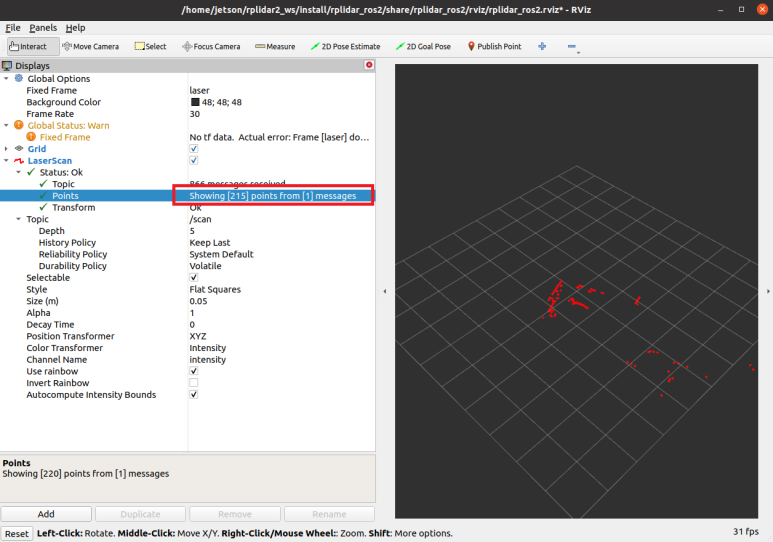
처음 Launch 파일을 실행했을 때처럼 RPLiDAR의 Scan Laser 메세지를 찾아서 Rviz2 설정에 추가해서 다시 노드 그래프를 살펴보면 /scan 토픽을 전달하고 있는 모습을 다시 볼 수 있습니다.
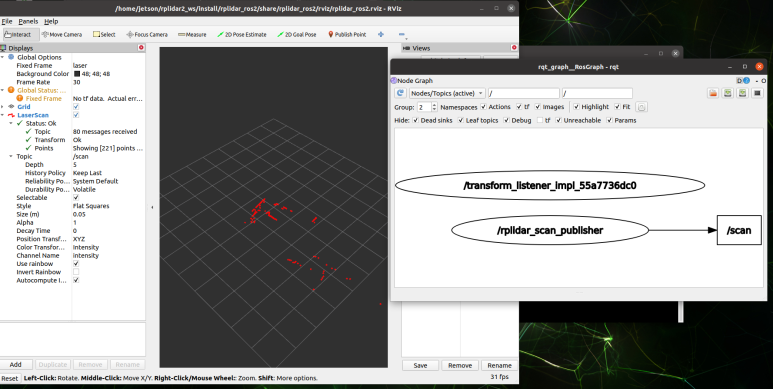
transform_listener는 많은 양의 /tf 토픽을 서브스크라이브 하는 역할이라고 문서에서 다룹니다. 즉 Rviz2에서 RPLiDAR A1을 좌표계인 /laser를 기준으로 한 내용을 읽어들이고 있는 것입니다.
그래서 RPLiDAR A1의 포인트 클라우드 좌표계를 기준으로(/transform_linstener) 포인트클라우드 데이터(/scan)를 퍼블리시 중인 /rplidar_scan_publisher 노드를 Rviz2가 서브스크라이브하여 출력 중입니다.
CLI 명령을 통해 노드 목록을 확인해보면 아래와 같습니다.

토픽과 메세지
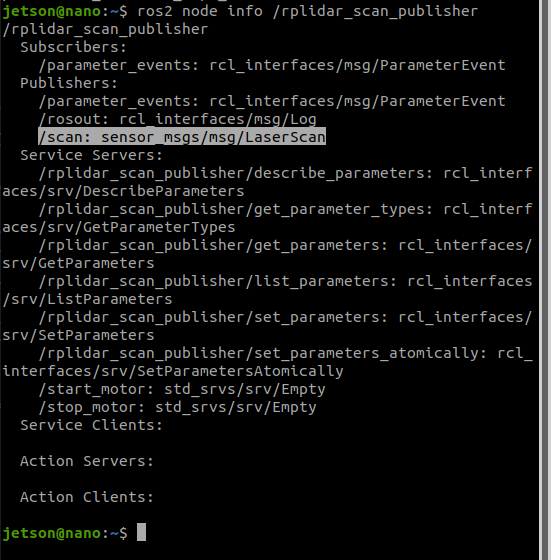
ros2 node info /rplidar_scan_publisher
RPLiDAR 퍼블리셔 노드의 세부 정보를 살펴보겠습니다. 퍼블리셔에서 /scan 토픽, 즉 라이다의 센세 데이터들을 LaserScan 메세지 담아서 퍼블리시 하고, 메세지 타입의 상세를 살펴보면 sensor_msgs/msg/LaserScan입니다.
이는 sensor_msgs라는 패키지에서 구성하는 내용으로 2D 포인트 클라우드 메세지 타입으로 많이 사용하는 메세지 형태 중 하나입니다. 아래와 같이 확인할 수 있습니다.
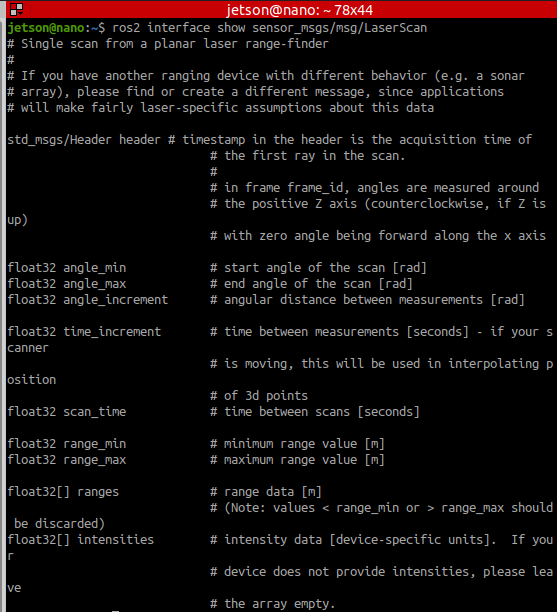
LaserScan 메세지에 내포하고 있는 변수의 구성을 살펴보면, 각도 최대/최소, 스캔 시간, 최대/최소 거리, 거리 데이터배열, intensity(반사되어 돌아오는 신호 강도) 배열로 구성되어 있습니다.
ros2 interface show sensor_msgs/msg/LaserScan
위의 CLI 명령어로 메세지 구성을 살펴보면 메세지가 포함하고 있는 변수의 구성을 아래와 같이 확인하실 수 있습니다.
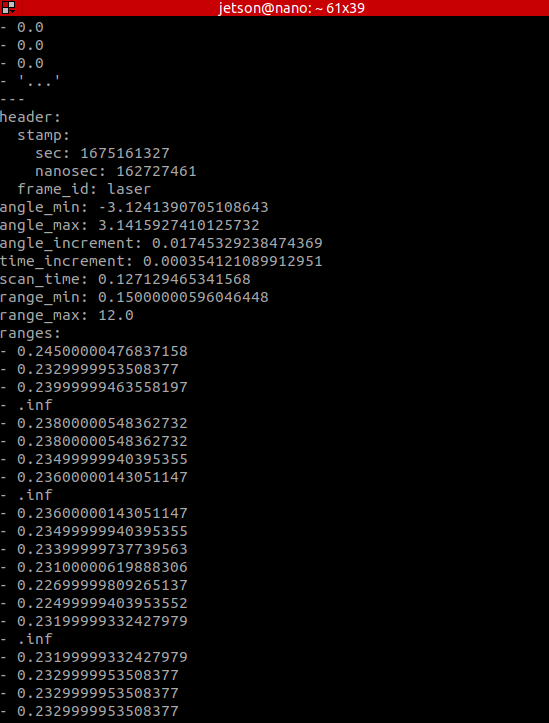
이제 해당 메세지의 데이터 값을 출력해보기 위해 토픽 echo를 사용해보면, 엄청난 속도로 값들이 나열됩니다. 덕분에 확인이 힘들고, 터미널에 표시되는 내용이 금방 잘리게 됩니다.
ros2 topic echo /scan
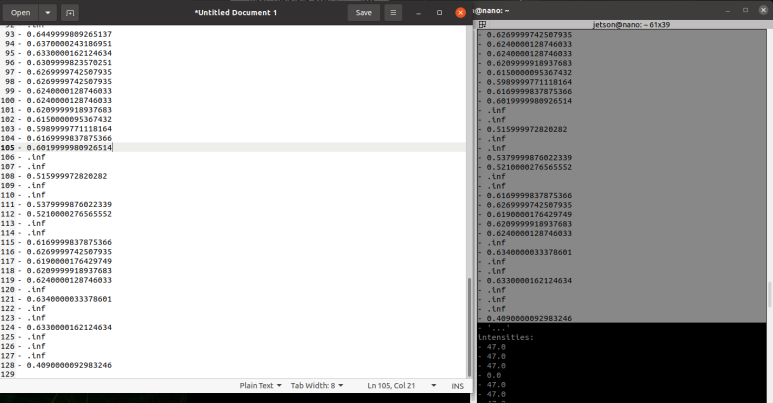
어쨌든 잠깐 echo 실행을 멈추고 거리데이터를 드래그해서 편집기에 붙여넣기 해보았습니다.
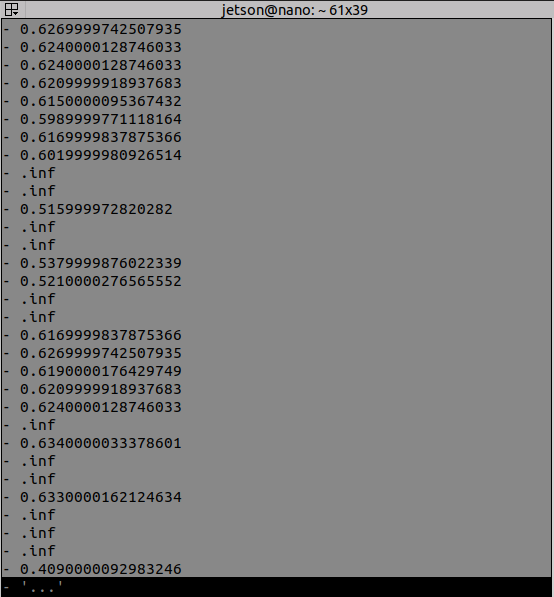
포인트 갯수가 이상하게도 128개 밖에 없습니다. 아무 생각없이 데이터를 echo 했을 때는 몰랐지만, 생각해보면 스캐닝 방식의 라이다인데 수가 너무 적습니다.
데이터 시트를 확인해보면 알겠지만 360°도 회전하면서 측정되는 rplidar의 각도 resolution은 1°입니다. 그렇다면 데이터가 360개가 되야하는데 말이죠, 앞선 Rviz2에서도 200개 가량의 포인트가 측정되고 있다는 걸 확인도 했구요.
그럼 나머지 데이터는 어떻게 출력할 수 있을까요?
토픽의 전체 데이터 엑셀파일로 저장하는 방법
ros2 topic echo --full-length --csv ($토픽이름) > ($원하는 엑셀 파일 이름.csv)
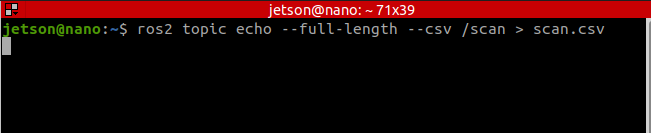
이 명령어를 입력하여 엔터를 쳐보시면 따로 작동하는게 없어보이는데 사실 이 명령어를 실행한 순간부터 데이터를 엑셀파일로 정렬하여 저장하고 있습니다. 아래에 보다시피 Home 경로에 scan.scv라고 이미지를 보다시피 제가 지정한 이름을 토대로 파일을 저장하였습니다.

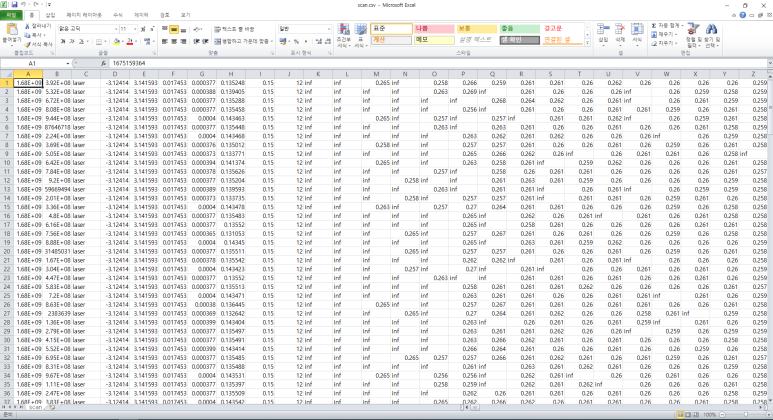
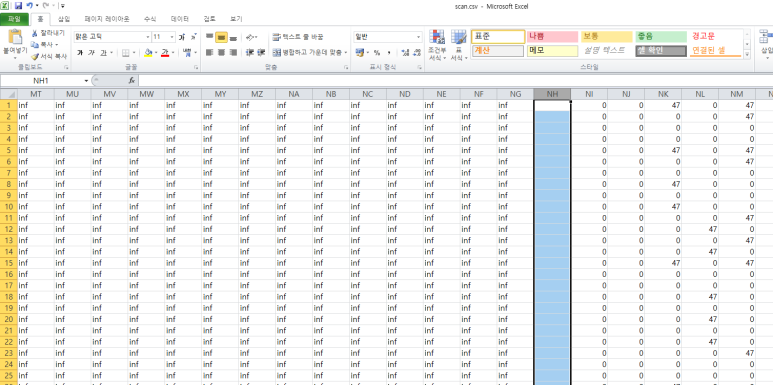
이를 윈도우에서 따로 살펴보았습니다. 뭔가 값이 엄청 많아 보이는데 중감쯤에서 0.15, 12라는 값이 눈에 띕니다.
앞에서 메세지 내부 파라미터를 살펴봤던 min / max_range 값에 해당하는 내용입니다.
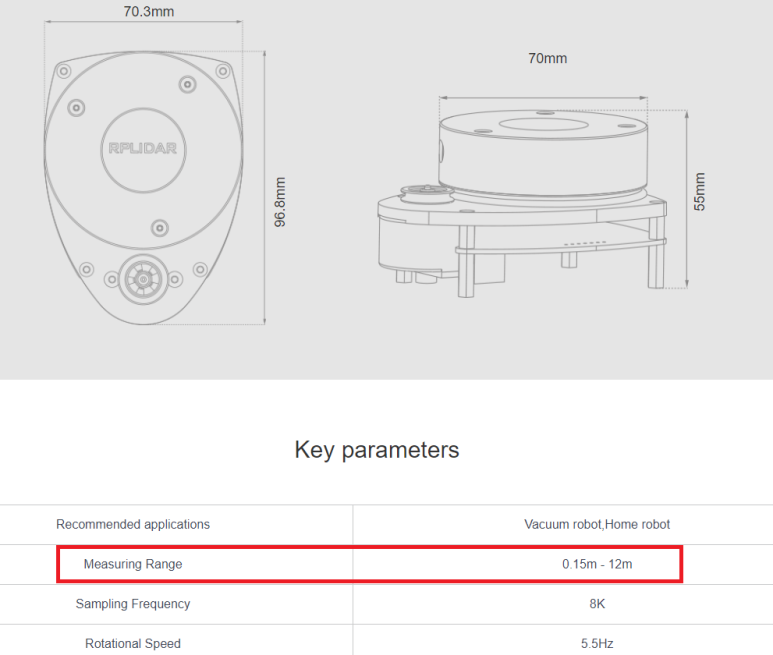
RPLiDAR A1의 스펙을 확인해보면 이는 측정거리임을 알 수 있는 것이죠.
그럼 데이터 구성이 어떻게 되는지 대략 파악했으니 시작, 끝나는 지점을 셀 삽입으로 분리해놓고 거리데이터들을 쉽게 드래그할 수 있도록 정리해보았습니다.
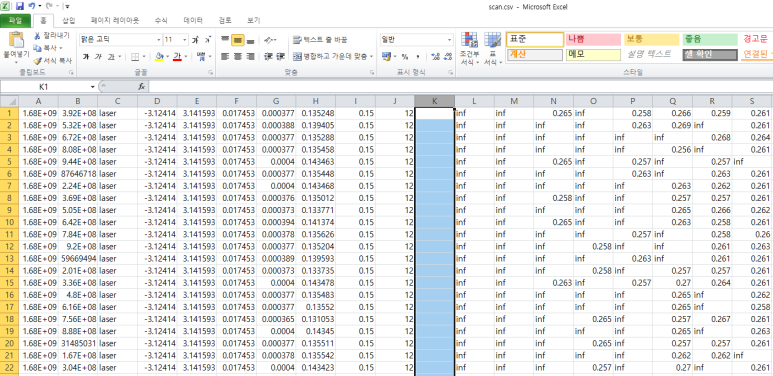 |  |
한 줄 전체를 드래그해서 살펴보니 데이터 갯수가 360개입니다.
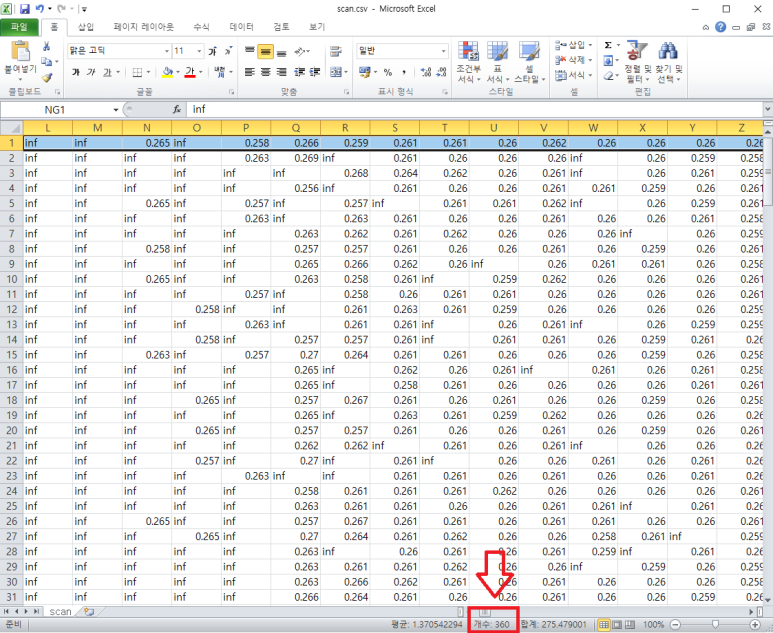
각 resolution이 1°, 360°이니 포인트 데이터는 360개의 데이터라는걸 드디어 확인했군요.

inf는 측정하지 못한 값으로 표현한 값이며, 이제 이 값들을 이용해 의도하는 분석 내용으로 데이터들을 다듬어 갈 수 있습니다.