ROS TF tree 보는 방법 / 저장 방법
in Ros

ROS에서 노드들을 실행하면서 현재의 TF 상황을 파악하려면 필요한 작업 중 하나입니다. Robot에서 중요한 요소 중 하나가 좌표계입니다. 문득 한 번씩 관련 내용을 확인하거나 저장하려고 보면 명령어가 떠오르지 않는 경우가 있더군요.
rqt를 사용하여 확인
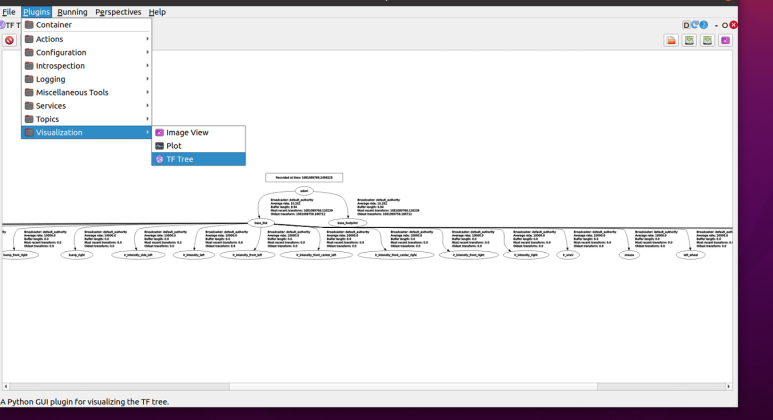
rqt의 상단 ‘Plugins 탭’을 보시면 위와 같이 TF Tree를 보시는 방법도 있지만 가상환경에서 작업하다보면 rqt plugins가 갖춰지지 않는 경우와 마주하기도 합니다. 그럴 때는 아래와 같은 방법이 있습니다.
TF tree 저장하는 방법
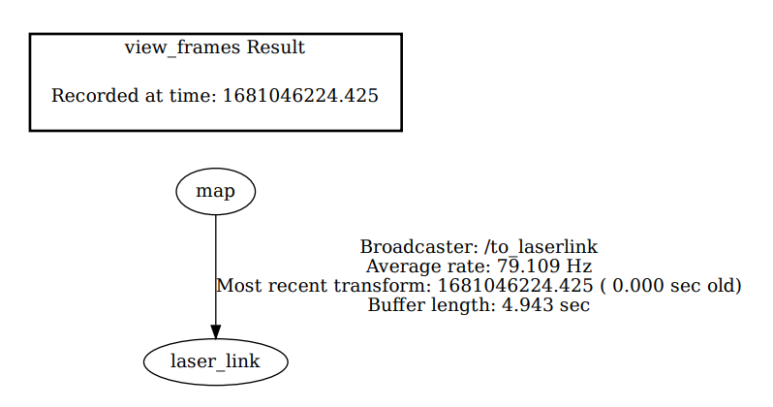
위와 같은 TF tree 그림을 ‘.pdf’형식의 파일로 저장하는 방법이 있습니다.
ROS1의 경우
rosrun tf view_frames.py
ROS2의 경우
rosrun tf view_frames.py